← Back to Projects 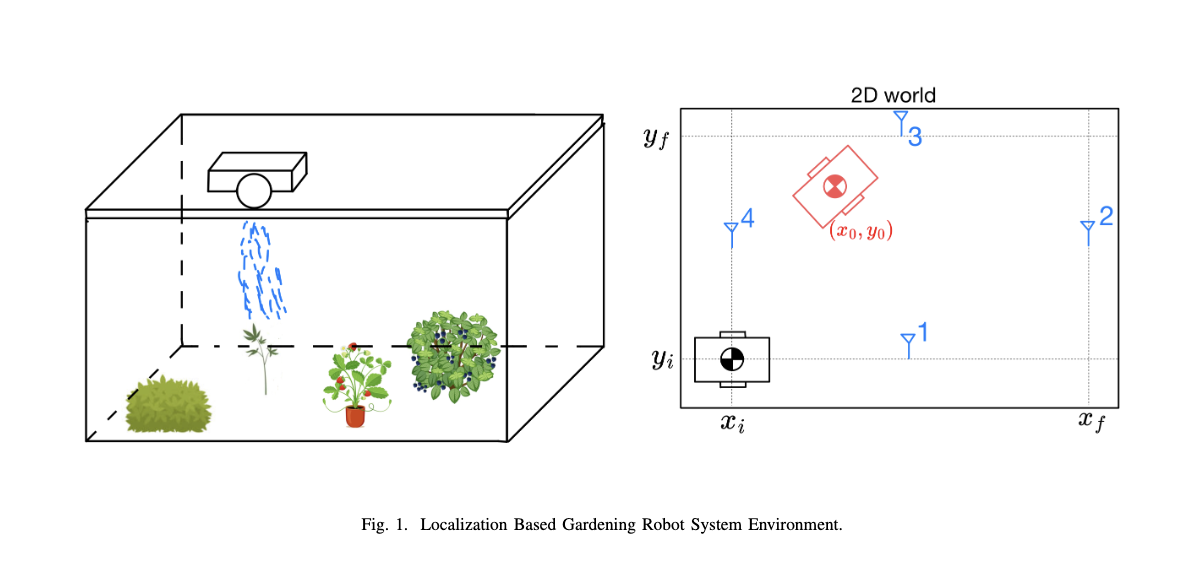
![]()
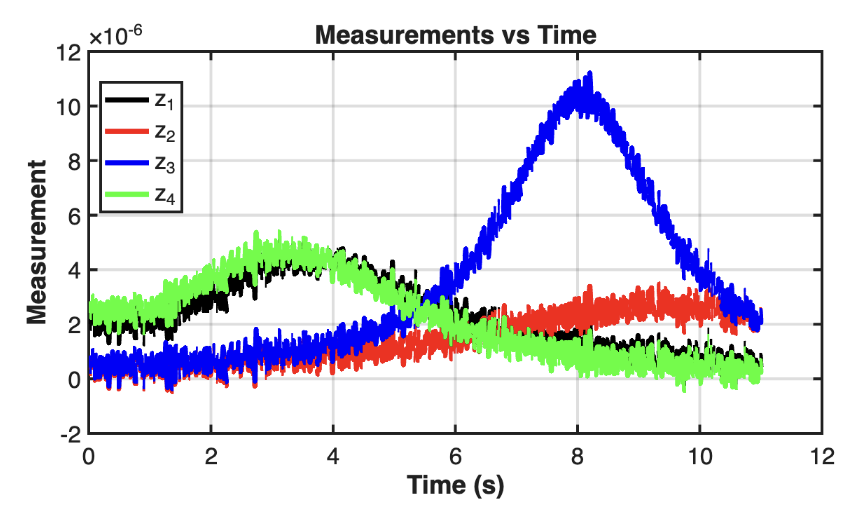
Kalman Filter Implementation
To create accurate estimates of the internal states of a non-linear, two-wheeled robot driving on a perforated surface with deterministic inputs and noisy measurements from RF sensors, an extended Kalman filter and Monte Carlo Kalman filter were implemented in MATLAB and Simulink.